
Dans les systèmes modernes d'automatisation et de contrôle de mouvement, une régulation précise de la vitesse est essentielle pour garantir les performances, l'efficacité et la longévité des produits. Que vous conceviez un système de suivi solaire, un équipement de pressage industriel ou des chaînes de montage automatisées, le choix du bon commande d'actionneur linéaire La solution dépend fortement des exigences de votre application et de vos contraintes budgétaires. Cet article passe en revue trois technologies de mouvement linéaire couramment utilisées :commande du vérin électrique, commande d'actionneur linéaire, et commande par guidage linéaire—et propose des stratégies de régulation de la vitesse optimisées en termes de coûts pour chacune d’entre elles.
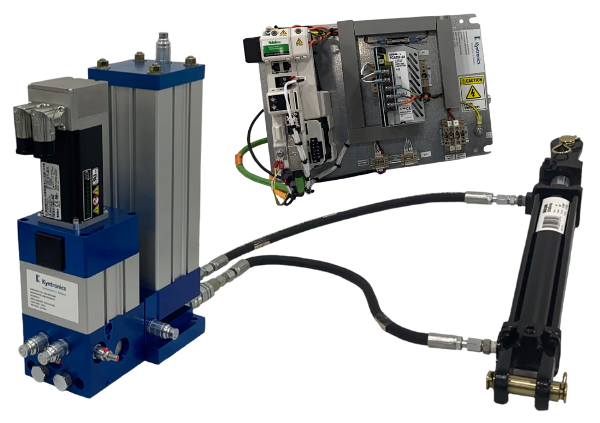
Vérin électrique équipé d'un servomoteur et d'un système de rétroaction par capteur de force :
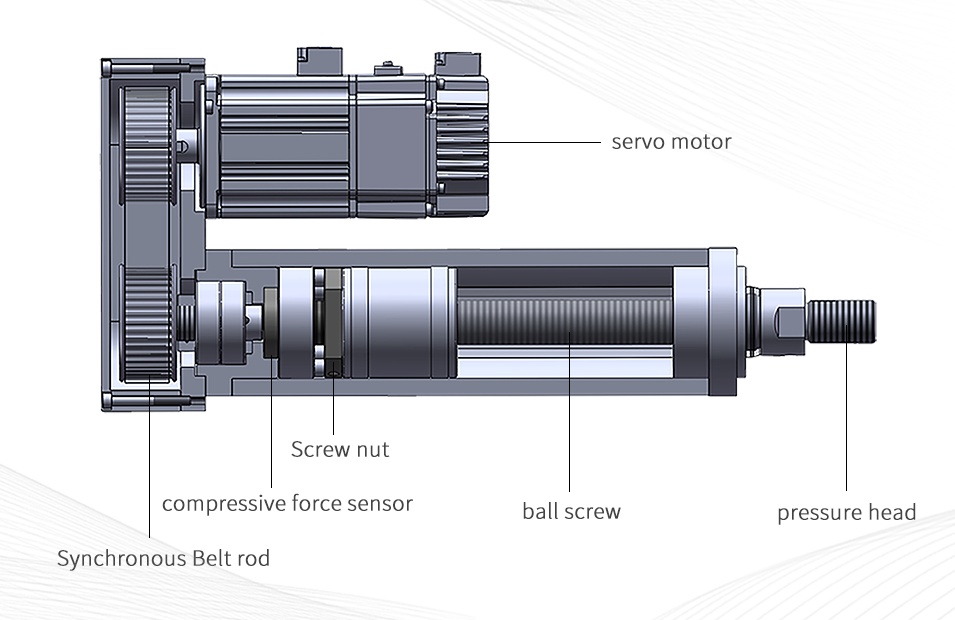
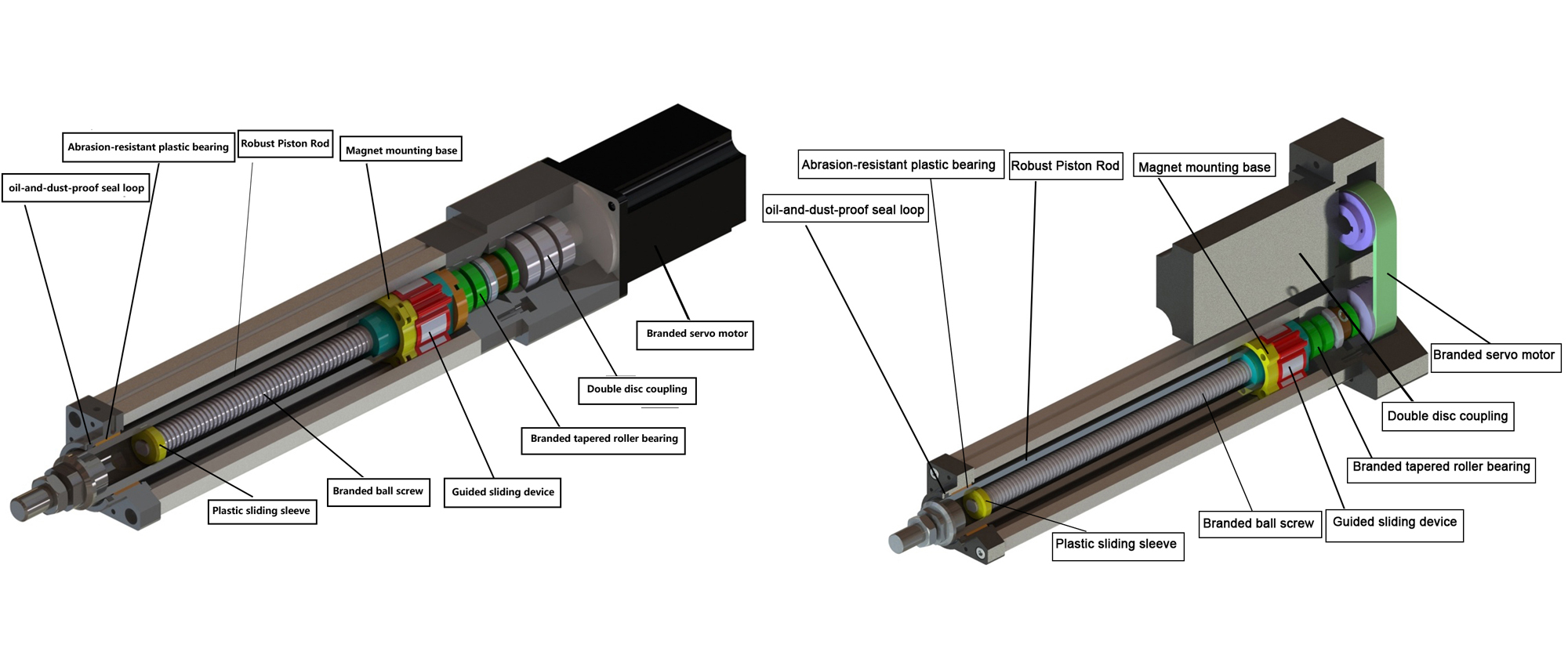
Structure interne d'un vérin électrique comportant une vis à billes et un servomoteur :
Unité d'alimentation servo avec système de commande de précision :
1. Commande de vérins électriques : applications nécessitant une grande précision et une force élevée
Un cylindre électrique (également appelé « vérin servo-électrique ») intègre un servomoteur et un mécanisme à vis à billes ou à rouleaux à l'intérieur d'un boîtier cylindrique rigide. Cette conception offre une poussée, une précision et une rigidité exceptionnelles, ce qui en fait la solution idéale pour les tâches de pressage, de serrage et de positionnement sous forte charge.
Méthodes de régulation de la vitesse
Pour commande du vérin électrique, la régulation de vitesse la plus efficace s'obtient grâce à systèmes d'entraînement servo avec une boucle de rétroaction fermée. Un servomoteur associé à un variateur dédié permet un contrôle précis de la vitesse grâce à la modulation de largeur d'impulsion (PWM) et à la rétroaction en temps réel du codeur. Les systèmes avancés peuvent également intégrer des capteurs de force pour un mouvement contrôlé par la pression.
Une alternative économique pour les applications nécessitant une précision moyenne consiste à utiliser un moteur à courant continu sans balais (BLDC) avec rétroaction par capteur à effet Hall associé à un simple contrôleur PWM. Bien que cela implique une légère perte de précision de positionnement par rapport aux systèmes à servomoteurs complets, cela permet de réduire considérablement les coûts tout en conservant une stabilité de vitesse raisonnable.
Optimisation des coûts
-
Haut de gamme: Système servo complet avec codeur absolu et retour de force (>$1,500)
-
Milieu de gamme: Moteur BLDC + capteur à effet Hall + pilote PWM ($300–$800)
-
Budget: Moteur pas à pas à commande en boucle ouverte ($150–$400)
Pour les applications nécessitant une poussée élevée et des profils de vitesse précis — comme le remplacement des systèmes hydrauliques dans les presses —, le système servo-commandé commande du vérin électrique Cette solution reste le choix optimal malgré des coûts initiaux plus élevés.
Système de portique à guidage linéaire multiaxial pour le contrôle de mouvement de précision :

Boîtier de commande pour actionneur linéaire avec régulation de vitesse intégrée :

Mini-actionneur linéaire avec potentiomètre et capteur à effet Hall pour le retour d'information :


Actionneur linéaire haute performance 12 V/24 V CC :

Régulateur de vitesse PWM pour moteur à courant continu destiné à un actionneur linéaire :

Actionneur linéaire à usage intensif avec capteur à effet Hall pour le retour de position :

2. Commande d'actionneurs linéaires : un système de mouvement polyvalent et économique
Actionneurs linéaires électriques Il s'agit d'unités autonomes qui transforment un mouvement rotatif en déplacement linéaire à l'aide d'un moteur à courant continu et d'un mécanisme à vis sans fin ou à vis à billes. Elles sont largement utilisées dans l'automatisation du mobilier, les équipements médicaux, les machines agricoles et les systèmes de suivi solaire en raison de leur simplicité et de leur fiabilité.
Méthodes de régulation de la vitesse
L'approche la plus courante pour commande d'actionneur linéaire est Régulation de la vitesse d'un moteur à courant continu par modulation d'impulsions (PWM). Un simple variateur de vitesse pour moteur à courant continu permet de régler la tension fournie à l'actionneur, et ainsi de contrôler les vitesses d'extension et de rétraction. Pour un contrôle bidirectionnel avec réglage de la vitesse, un circuit de commande en pont en H avec entrée PWM est indispensable.
Pour une fonctionnalité améliorée, les actionneurs dotés d'un Capteurs à effet Hall ou potentiomètres fournissent un retour de position, permettant ainsi des profils de vitesse en boucle semi-fermée. Ces options de retour d'information permettent aux contrôleurs de maintenir des vitesses constantes en cas de variations de charge et d'éviter les collisions avec les butées.
Optimisation des coûts
-
Haut de gamme: Actionneur avec capteur à effet Hall + contrôleur programmable avec démarrage/arrêt progressif ($200–$500)
-
Milieu de gamme: Actionneur standard 12 V/24 V + régulateur de vitesse PWM externe ($80–$200)
-
Budget: Actionneur de base 12 V CC à commande simple par tension ($30–$80)
Pour les systèmes de suivi solaire et les applications industrielles légères où une précision modérée suffit, la gamme intermédiaire commande d'actionneur linéaire Cette solution offre le meilleur compromis entre performances et prix.
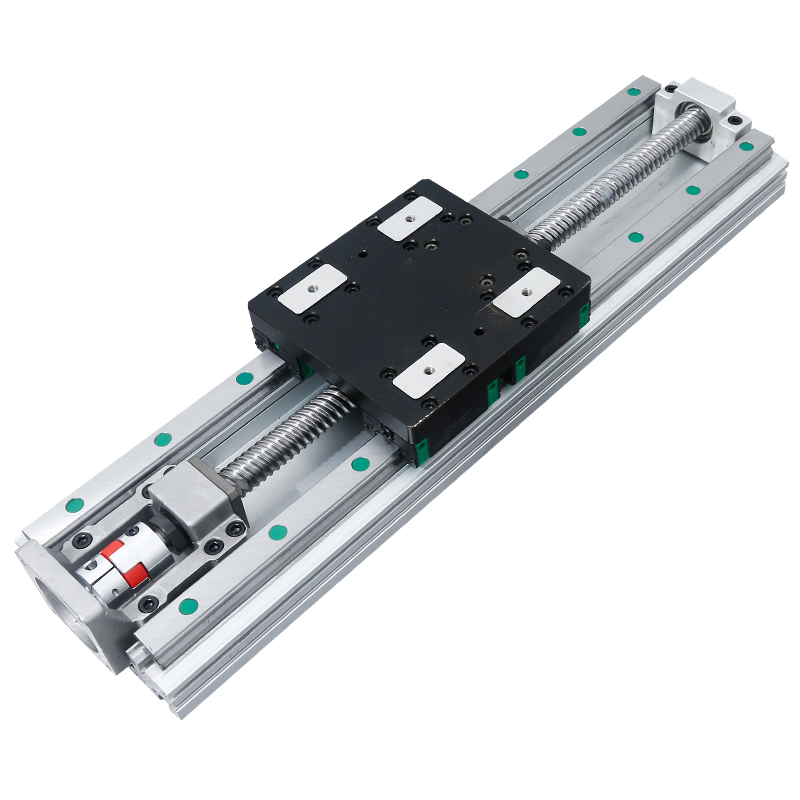
Système de guidage linéaire à vis à billes XYZ :

Vérin servoélectrique à entraînement par courroie synchrone :

Module linéaire avec servomoteur et vis à billes :
3. Commande par guidage linéaire : précision multi-axes et grande course
Modules de guidage linéaire (également appelés « tables à mouvement linéaire » ou « modules linéaires ») associent une vis à billes ou un entraînement par courroie à des rails de guidage linéaires afin de créer une plate-forme de mouvement stable et à faible frottement. Associés à des servomoteurs ou à des moteurs pas à pas, ils permettent un positionnement précis sur de longues courses dans les machines CNC, les imprimantes 3D, les robots de manutention et les systèmes à portique.
Méthodes de régulation de la vitesse
Commande de guidage linéaire repose généralement sur commande de servomoteur pour les applications à grande vitesse et haute précision. Les servosystèmes équipés de codeurs linéaires ou rotatifs montés sur l'arbre du moteur permettent un contrôle en boucle fermée de la vitesse et de la position. Le pas de la vis à billes influence directement la vitesse linéaire : les vis à pas plus élevé permettent des déplacements plus rapides, mais nécessitent un couple plus important.
Pour les applications où le coût est un facteur déterminant, moteurs pas à pas équipés de pilotes à micropas constituent une alternative viable. Bien que les systèmes à moteur pas à pas n'offrent pas la même réponse dynamique que les servomoteurs, ils permettent un contrôle de vitesse suffisant pour les applications à vitesse faible ou modérée. L'ajout d'un codeur linéaire peut améliorer la précision sans entraîner le coût total d'un système à servomoteur.
Optimisation des coûts
-
Haut de gamme: Servomoteur + codeur linéaire + module à vis à billes de précision ($1 000–$3 000)
-
Milieu de gamme: Moteur pas à pas + module à vis à billes + pilote de base ($200–$600)
-
Budget: Moteur pas à pas + module à entraînement par courroie ($100–$300)
Pour les systèmes à portique multiaxiaux et les chaînes de montage automatisées, la gamme intermédiaire commande par guidage linéaire Cette configuration offre un excellent rapport qualité-prix, alliant une bonne précision et un bon contrôle de la vitesse pour un coût bien inférieur à celui d'un servomoteur complet.
Tableau comparatif et guide de sélection optimale
Tableau
| Technologie | Idéal pour | Méthode de régulation de la vitesse | Fourchette de prix | Le choix optimal |
|---|---|---|---|---|
| Cylindre électrique | Pressage à haute force, serrage | Servomoteur/moteur BLDC avec codeur | $150–$1 500+ | Servomoteur pour la précision ; BLDC pour le milieu de gamme |
| Actionneur linéaire | Une force modérée, une automatisation simple | Commande d'un moteur à courant continu par modulation d'impulsions (PWM) | $30–$500 | Capteur à effet Hall + PWM : le meilleur rapport qualité-prix |
| Module de guidage linéaire | Systèmes multiaxes à grande course | Servomoteur/moteur pas à pas avec codeur | $100–$3 000 | Moteur pas à pas + vis à billes pour un bon rapport qualité-prix |
Cadre décisionnel
-
Pour les applications nécessitant une force élevée et une grande précision (par exemple, pressage, équipements d'essai) : Choisissez commande du vérin électrique avec des systèmes servo. La rigidité et les capacités de retour de force justifient l'investissement.
-
Pour une automatisation simple avec des charges modérées (par exemple, des suiveurs solaires, du mobilier modulable) : Choisissez commande d'actionneur linéaire grâce à un système de rétroaction par capteur à effet Hall et à des contrôleurs PWM. Cela permet d'obtenir un contrôle fiable de la vitesse au moindre coût par unité de fonctionnalité.
-
Pour les systèmes de précision multiaxiaux à grande course (par exemple, CNC, bras robotisés) : Choisissez commande par guidage linéaire avec des moteurs pas à pas et des modules à vis à billes. Ne passez aux servosystèmes que lorsque des performances dynamiques et une précision à grande vitesse sont indispensables.
Conclusion
Pour choisir la solution optimale de régulation de vitesse, il faut trouver un juste équilibre entre les exigences de performance et les contraintes budgétaires. Commande du vérin électrique excelle dans les tâches de précision nécessitant une force élevée, commande d'actionneur linéaire offre une simplicité et un rapport qualité-prix inégalés pour l'automatisation générale, et commande par guidage linéaire offre la meilleure plateforme pour les systèmes de mouvement complexes et multiaxiaux. En adaptant la stratégie de commande aux besoins spécifiques de votre application, vous pouvez obtenir un contrôle de mouvement efficace et fiable sans dépenser inutilement pour des fonctionnalités superflues.

Laisser un commentaire